Project Overview:
In my Design Methodology course, our project centered on designing and constructing a BattleBot. Working in a team of six, we encountered the challenge of adhering to a strict 3-pound weight limit, which served as the primary constraint for our design.
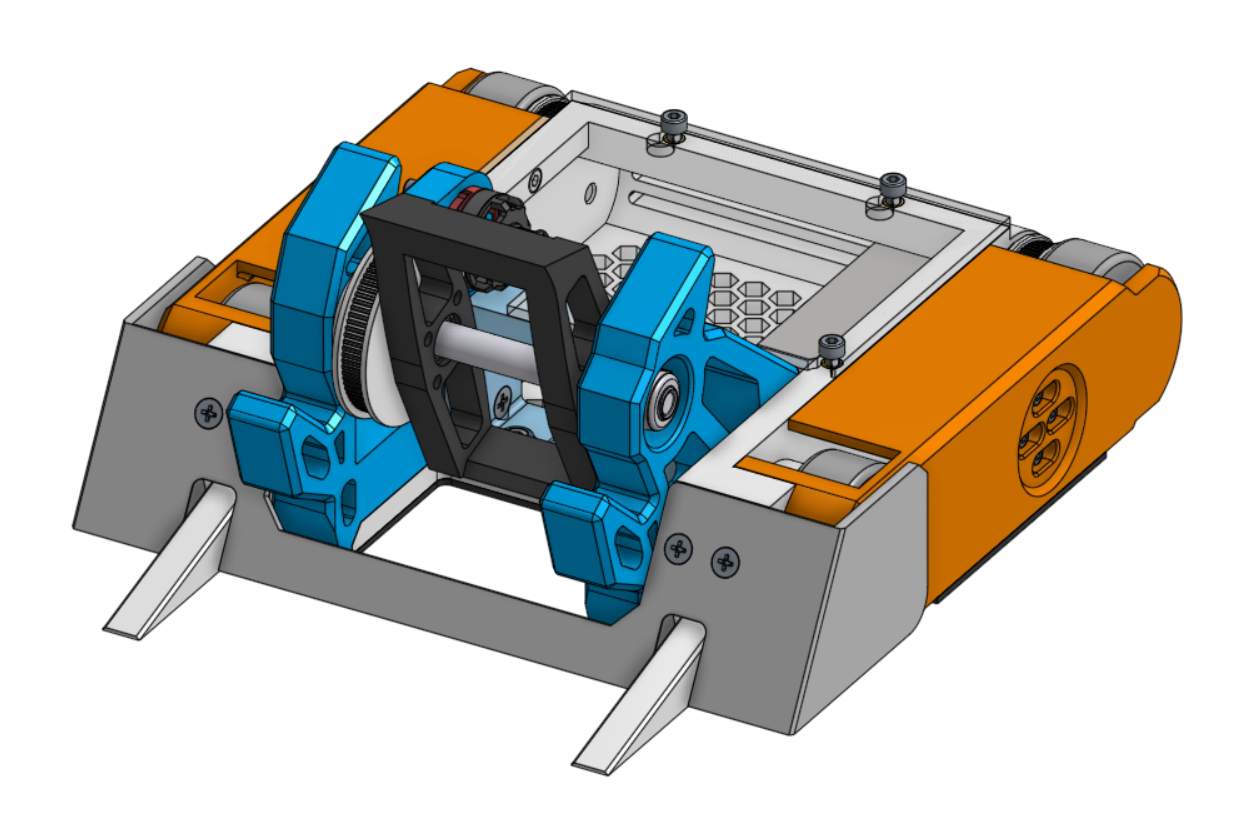
Robot Design and Construction:
Aligned with the project's requirements, our robot was primarily constructed using 3D-printed parts, ensuring both lightness and structural integrity. We outfitted the robot with five high-performance outrunner drone motors selected for their efficiency and power-to-weight ratio.

Control System:
The motors are controlled by three-phase electronic speed controllers, a standard choice for managing drone motors due to their precision and reliability. These controllers interface with an Arduino Nano esp32, forming the core of our robot's control system.

Communication and Debugging:
Initially, we chose a Bluetooth-based control system for its simplicity and accessibility. However, we encountered significant latency issues between user inputs and the robot's responses. My current focus is on troubleshooting and resolving these latency issues through software adjustments. If these efforts do not yield the desired results, our next step is to transition to an RF (Radio Frequency) based control system, which could provide a more robust and responsive communication channel.