Project Objective:
In Advanced Mechatronics I (ME 392Q), my team and I were assigned to create an autonomous hockey shooting robot. The challenge involved targeting and scoring in one of three goals identified by IR emission. Our five-member team collaborated to bring this concept to life.
First Prototype:
I built a rapid prototype using LEGOs and a motor to test our flywheel concept. This initial model allowed us to validate the basic mechanics of the shooting mechanism.
Second Prototype:
Building on insights gained from the LEGO prototype, I designed a more advanced version of the mechanical shooter and loader. This iteration was created using 3D printing and laser-cut plywood for cost-effectiveness and ease of assembly. In addition to the mechanical design, I took the lead on the electrical aspects, handling the wiring and motor control. This involved using two L298n H-Bridge motor drivers, controlled by a combination of a Raspberry Pi and Arduino shield. The codebase was split between the Arduino IDE and Python, and my primary focus was on Arduino, ensuring smooth motor operation and encoder functionality.
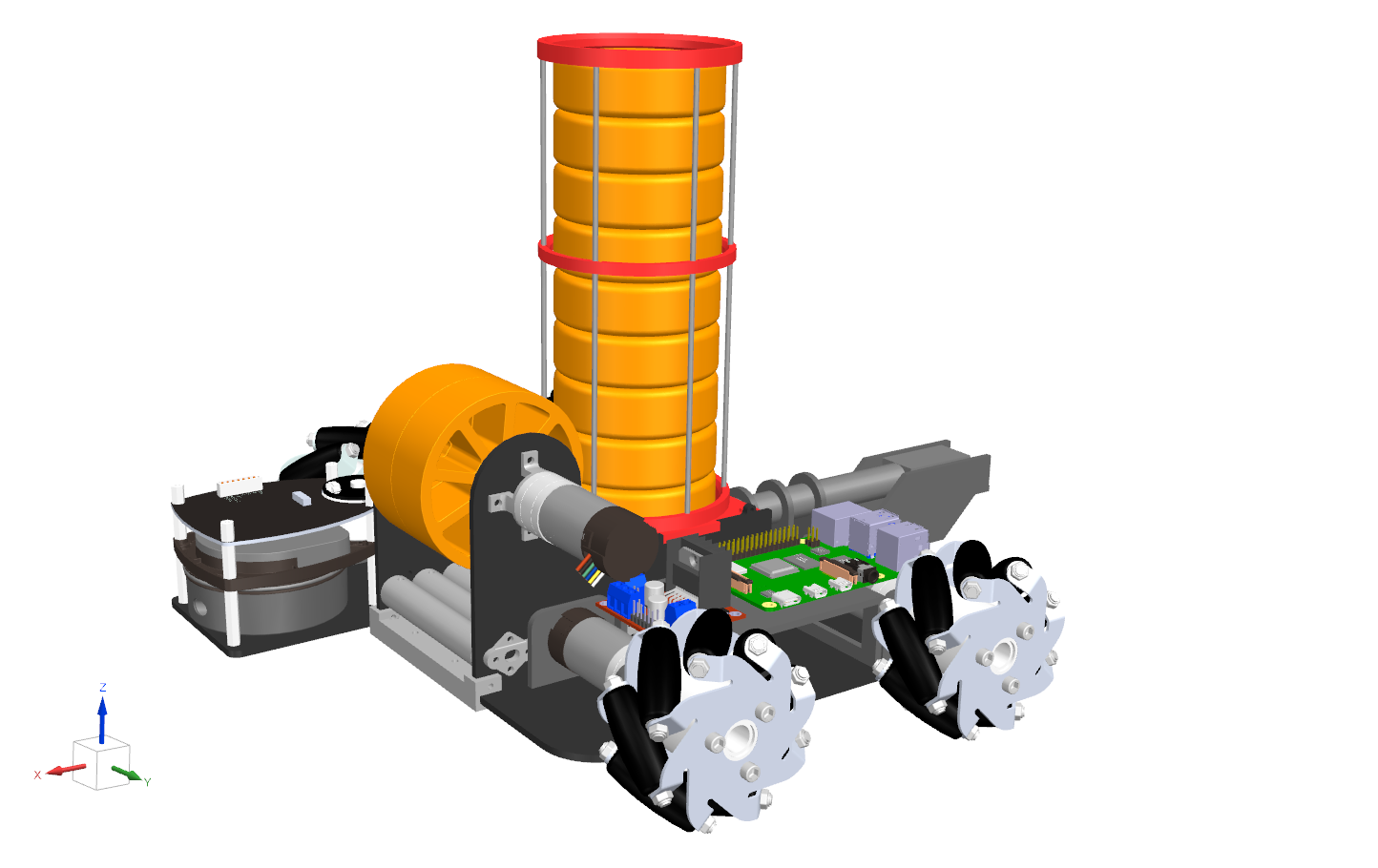
Final Robot:
Throughout the development process, we identified key areas for improvement. The chassis and motor mount initially lacked the necessary rigidity to support the robot's weight, and the mecanum wheels, though innovative, proved impractical within our time constraints and chassis limitations. As a result, we transitioned to a more traditional tank drive system and upgraded to a laser-cut acrylic chassis for enhanced support and stability.
I will update once the class is finished and the robot is complete.