
Objective:
My primary responsibility is to support two Ph.D. students in the development of Draco 3, a humanoid robot, with a focus on mechanical design to address various robot-related challenges.
Encoder Mount Redesign:
The original knee motors of the robot were insufficient to bear the weight on one leg. To address this, the motors were upgraded to higher-strength ones, but this caused a mismatch with the magnetic motor encoder mount. I resolved this issue by designing a new encoder mount that allowed using the previous magnetic encoder on the upgraded motors, thereby eliminating encoder reading noises.

The final part is printed in a black SLA 3D printer.
Ankle F-T Sensor Mount:
Initially, Draco 3 had strain gauges on the ankle, but they did not function as intended due to a design oversight. The Ph.D. students opted to replace the strain gauges with ATI Mini45 force-torque sensors. I designed a mount taking into account safety considerations, manufacturability, and ease of installation. Furthermore, I conducted extensive finite element analysis to ensure that the parts had a safety factor of two, indicating their ability to withstand double the load.

The final part is machined out of aluminum 6061-T6
Revised Ankle F-T Sensor Mount:
The humanoid robot faced issues with its limited range and off-centered ankle roll. To address this, I redesigned the F-T Sensor Mount as the existing ankle stopper was not centered, causing problems for the Ph.D. student. Once again, I performed thorough FEA on the redesigned parts to ensure they met a safety factor of two.

This is machined out of aluminum 6061-T6
Foot Soles:
To mitigate the impact of steps on the robot, I proposed the creation of rubber soles to reduce the impact force. Initially, I explored the option of sourcing rubber soles from Vibram, a shoe manufacturer that supplies Agility Robotics. However, we decided to manufacture the soles in-house due to cost and timeline considerations.
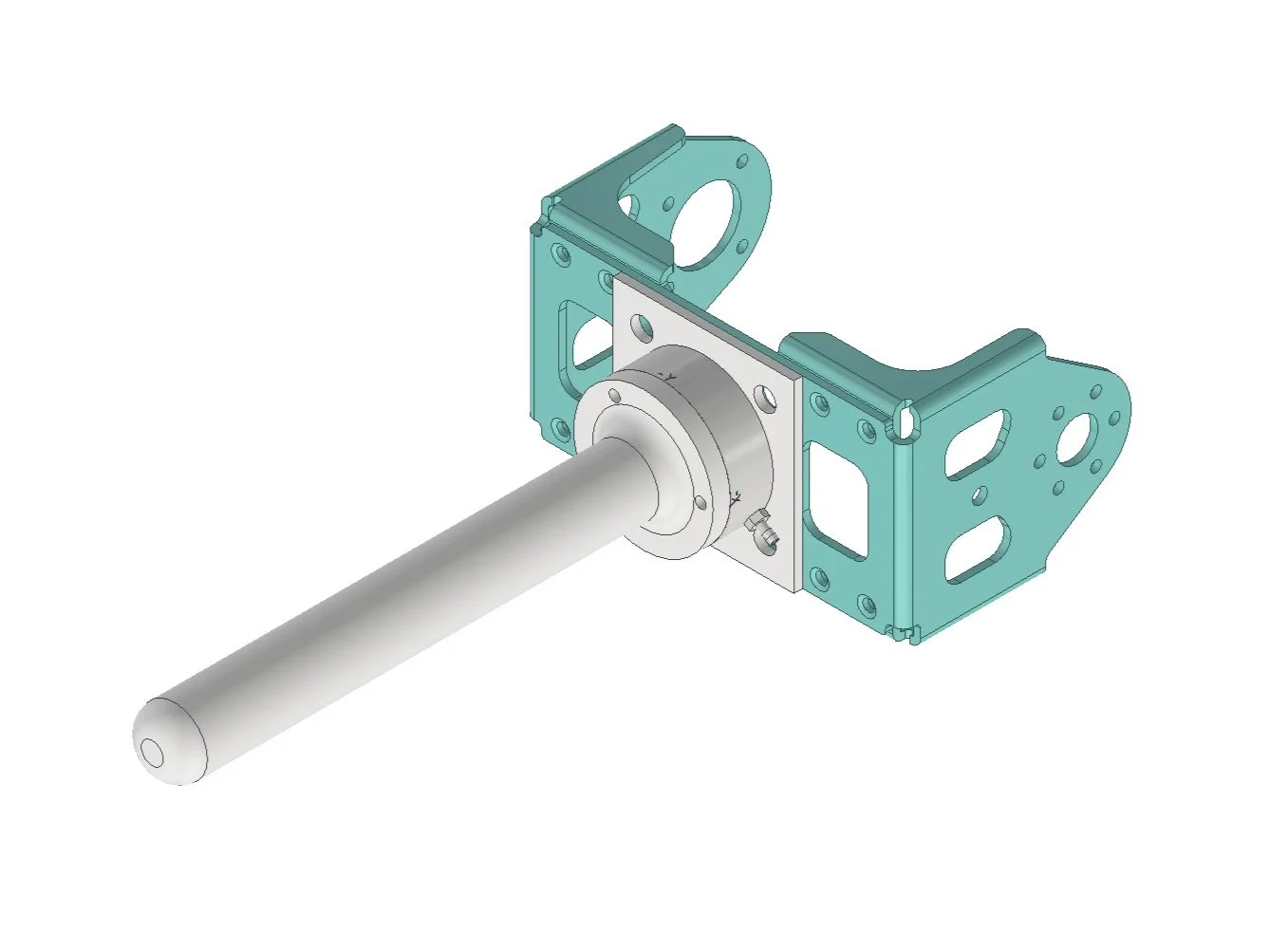
Hand Replacements:
One of the Ph.D. students wanted to replace the hands with contact-sensing rods for multi-contact research involving all four limbs. To accommodate this, we utilized a smaller ATI Mini40 F-T sensor for contact sensing and replaced the existing hands on the robot. Additionally, I developed a URDF of a modified robot for ROS simulation for the Ph.D. student.
Various 3D Printed Parts:
I also designed several miscellaneous 3D prints for Draco 3 robot, such as PCB Board Mounts.
