Introduction
Internship Overview:
During my internship at Sony, I worked on the Plato Project, a joint initiative between Sony and UT Austin to develop a teleoperated robotic system with arms and hands capable of fine-tuned manipulation and haptic feedback. I focused on solving critical issues with the Plato Hand V1 to ensure it met the high precision and reliability standards required for tasks such as playing Jenga and other tabletop games.

Challenges and goals:
Torque Issues: The HT2205 motors had a specified torque rating of 0.04Nm; however, we could only extract 0.03Nm after further evaluation. This is an issue, as to pick up a Jenga block, we would need 0.031Nm, and if we wanted to do additional manipulation with the hand, more torque would significantly increase the capabilities. The main goal of the internship is to fix the torque issue of Plato V1, enabling Sony to proceed with their in-house research and development.
Electrical System Complexity: The original design's complicated wiring system had 81 wires, and the electrical was hot-glued on the base, making maintenance challenging. We experienced this challenge firsthand at UT Austin, as there was a short hole in the electrical system, and we haven’t been able to fix it. Revamping the electrical system is a secondary goal of the internship.
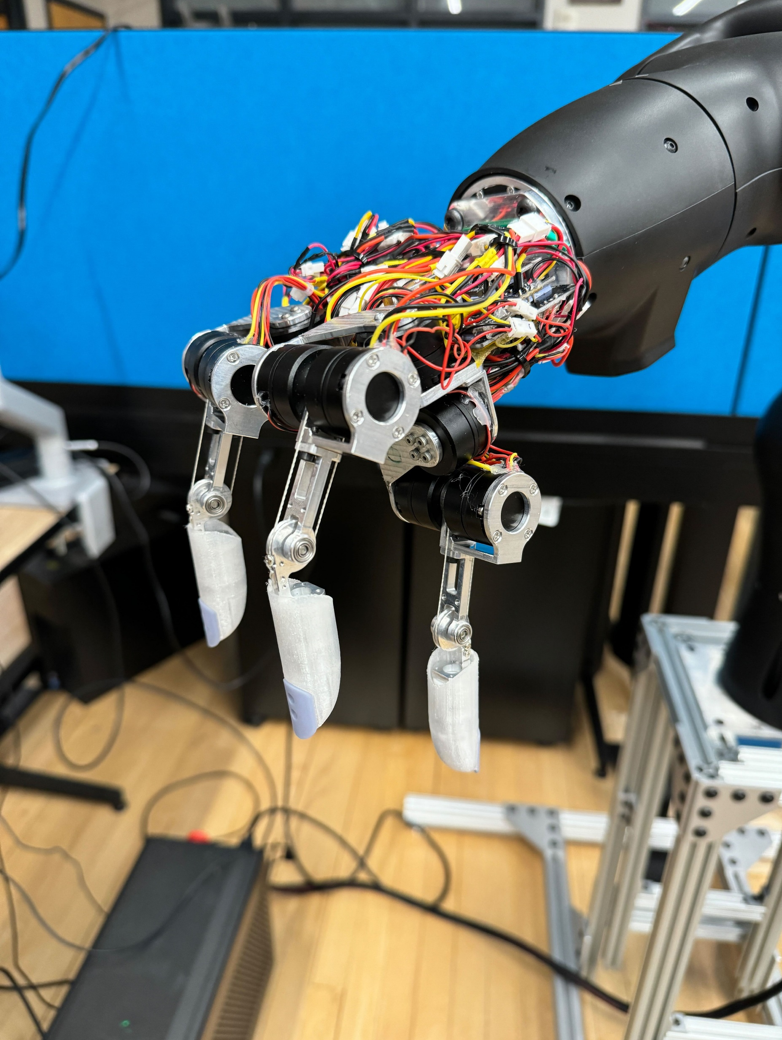
Plato Hand V1 at UT Austin
Plato Hand V1.5
Torque Fixes:
I implemented 30:1 harmonic drives to the MCP joint of Plato Hand, amplifying the torque from 0.03Nm to 0.9Nm, allowing the hand to have more manipulation capabilities.
Why harmonic drive?
The department I was working with has previous experience using the harmonic drive, which would allow technical support from the mechanical engineers there.
The internship was on a tight timeline, so an off-the-shelf product was necessary to complete the goals
0 backlash, which is critical for fine & precise manipulation
Maintaining back-driveability of the motors is a crucial point of the hand that improves safety when playing with other human players.
However, there was not enough room for a harmonic drive to be installed on the PIP joint. Instead, I adjusted the pulley ratio from 1:1 to 1.49:1, increasing the torque to 0.045Nm.
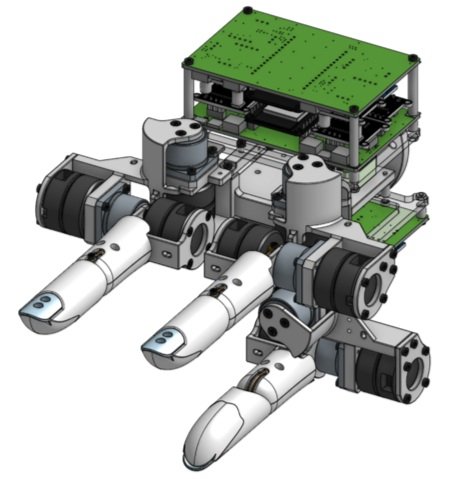

Full CAD Assembly of Plato Hand V1.5
Cross-section view of finger with 1.49:1 pulley ratio
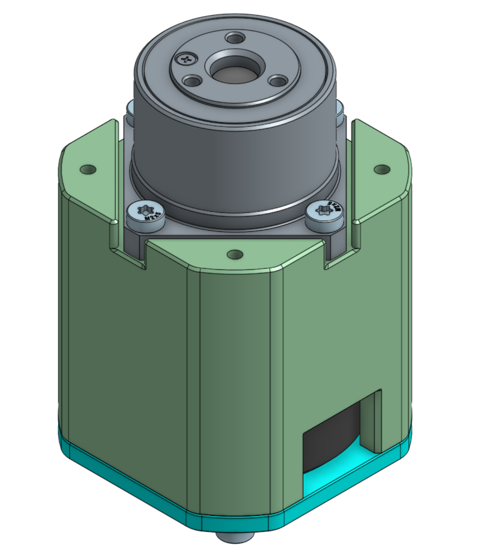
HT2205 harmonic drive test rig
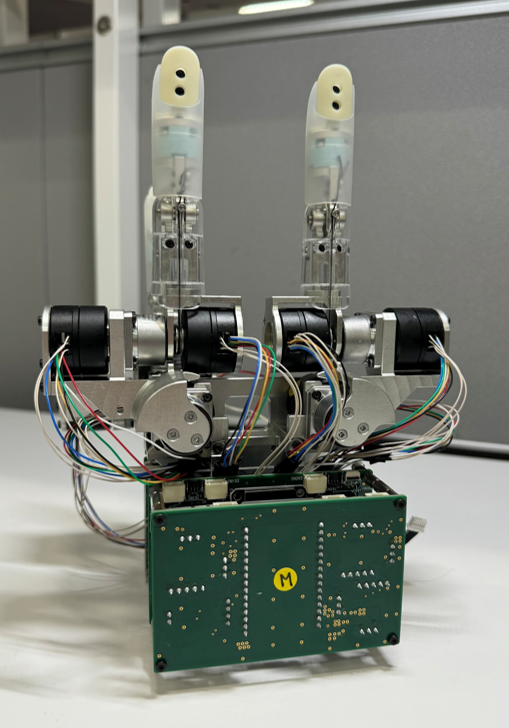
Electrical System Revamp:
PCB was designed to hold one finger’s electrical system
SimpleFOCMini V1.0 (3x)
ESP32 Devkit V1.0 (1x)
TJA1050 can transceiver (1x)
Electrical mount was designed for:
Ease of maintenance
Good reliability
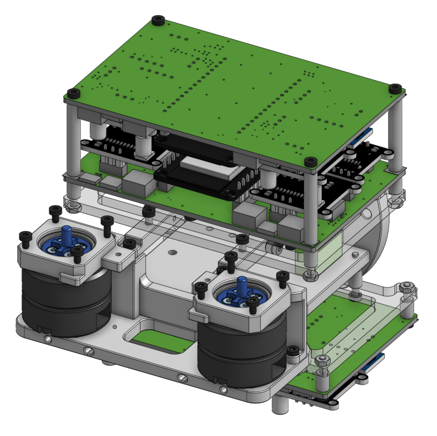
Electrical Assembly of Plato Hand V1.5
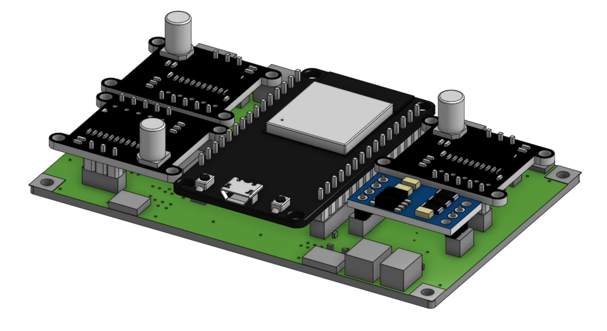
Finger PCB