Plato V2 Demo Video
Objective:
I am currently involved in a new project at HCRL Lab called Plato. This collaborative effort involves two significant partners: Roboligent, which provides robotic arms and manufacturing support, and Sony, the primary funder and proposer of the project. Plato aimed to develop robotic systems capable of playing Jenga using teleoperation against a human opponent. The hand's novel aspects have been designed considering human safety; specifically, the fingers are back-drivable. Additionally, the fingers have fingernails with 6-axis FT sensors, enabling complex manipulations.
Plato Hand V2 Mechanical Development:
We have started the R&D of Plato V2, the successor of Plato V1/V1.5, trying to overcome the initial shortcomings. The hand's fundamental design is linkage-driven fingers and QDD motors, enabling back-drivability and proprioceptive force sensing. I went through several different iterations of the hand, going through minor and significant changes, the major milestones of which are shown below. We had a simple idea of doing what most other linkage-driven hands do: using a 4-bar linkage and stacking them to create a finger. However, with how our motors are configured, the back motors must move/rotate the front motors. When doing a design review, we didn’t like how one of the motors had to carry the weight of the other motor, making it inefficient. I decided to merge the two 4-bar linkages into a 5-bar linkage, which eliminated the moving motor and simplified the design, making it more compact.

First milestone: rough assembly of double 4-bar hand

Second milestone: refined assembly of double 4-bar hand

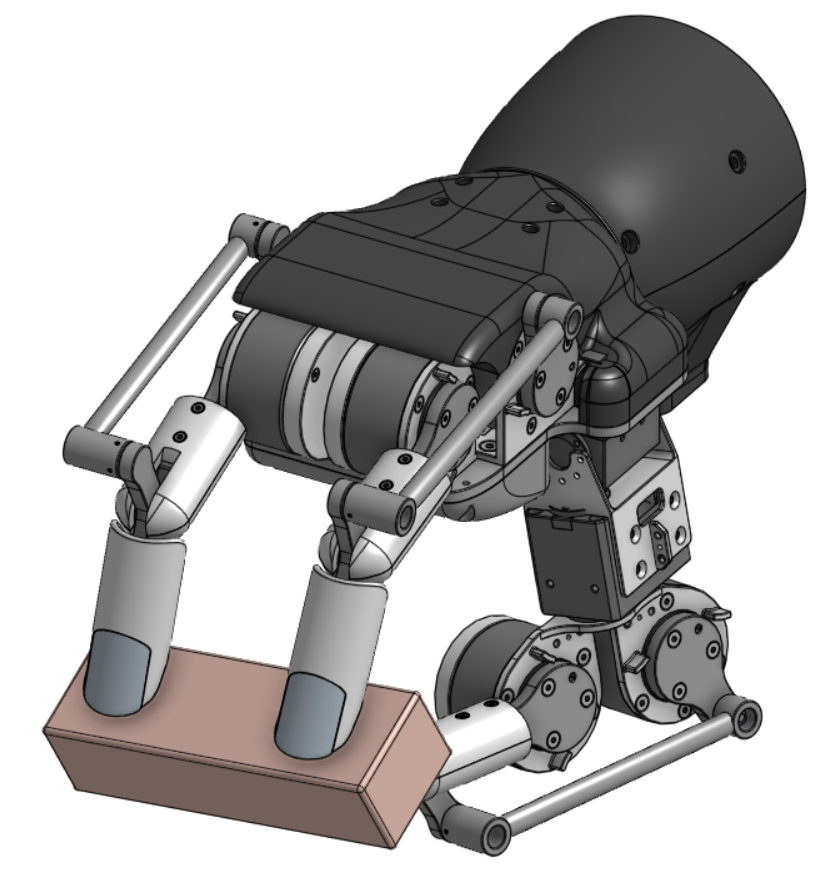
Third milestone: Initial refined assembly of 5-bar hand
Fourth milestone: Current prototype hand design
Plato Hand V2 Initial Testing:
After assembling the hand, we did simple testing to validate its capabilities and controllers.